

Information Technology (IT) Pioneers
Retirees and former employees of Unisys, Lockheed Martin, and their heritage companies
Navy Systems, Chapter 67
The Naval Tactical Data System (NTDS) development began about 1955. This system was designed by the Navy under the direction of Don Ream, et al' to automate the collection of combat data into an overall tactical picture. UNIVAC was one of three major companies working on the development under the Navy's direction.
NTDS used multiple identical computers working together, real time, with a very advanced Input/Output (I/O) system. Ships were connected via radio links. This was an electronic communications system of unprecedented size in operation 25 years before the internet! The NTDS interfaced via LINK communications with the Marine Tactical Data Systems and the Airborne Anti-Submarine Warfare systems.
The best story about the NTDS development is in the book "When Computers went to Sea" by Capt. David Boslaugh. The Navy Surface Systems Genealogy chart below shows the evolution as well as the expansion to foreign Navies. A description is below the genealogy chart, followed by Don Lovely's carrier experience. Thanks to Bob Scholz and others for this Navy ship section. Please refer to the Systems - International page for additional text about the Canadian, Japanese, and German Navy systems.
In addition to the NTDS aboard surface ships, the LEGACY systems included shipboard missile launch systems and submarine systems. The Bitsavers website has an NTDS study paper, copied into our site for researcher convenience.
2. Navy Surface System Genealogy
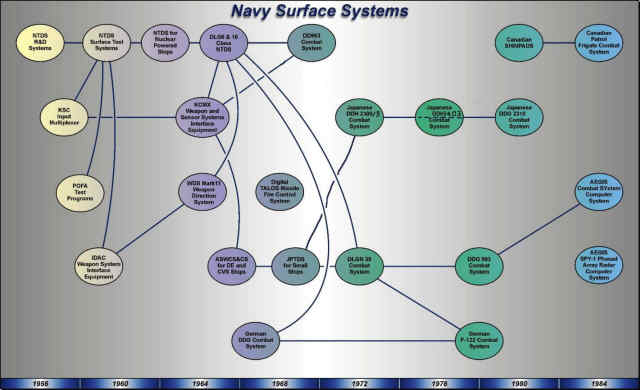
See figure at the right. The Naval Tactical Data System Characteristics are in a brochure.
3. Navy Systems' Descriptions
3.1 NTDS R&D Systems (Six Systems) 1955-1959
Remington Rand Univac (RRU) developed the solid state unit computer (AN/USQ-17), some associated equipment, and computer programs for the computerization of the Combat Information Center (CIC) of navy ships. RRU developed the interface standards which allowed the computers to communicate with other equipment including displays and communications gear. RRU also developed a software compiler for building computer programs for the system. The system was called the Naval Tactical Data System (NTDS). The several unit computers on a ship were able to communicate directly with each other without an intervening device which was a first [Design Specification, DS4772, designated these Input/Output channels as Inter-computer channels which functioned slightly differently than computer to peripheral channels.] The UNIVAC Design Specification 4772 eventual became Mil-Std-1397.
3.2 NTDS Service Test Systems (Two Destroyers and one Aircraft Carrier) 1960-1962
The solid state computers were redesigned using newer technology transistors which made them more reliable and twice as fast. Multiple computer systems were installed on the three ships and the systems successfully passed service test. The redesigned computer was designated CP-642. Production versions of the unit computer were designated CP-642A.
3.2.1 POFA (Programmed Operational Functional Appraisal Tests - 1960
Remington Rand Univac developed the concept of testing the interfaces and functions of the equipment connected to the digital NTDS computers utilizing computer programs operating in the digital computer. This allowed the systems to be integrated in a systematic manner, one equipment at a time.
3.2.2 Interface Equipment critical to many ships:
- Interconnecting Digital to Analog Converter (IDAC) interface between digital NTDS and analog weapon system - 1960. The IDAC equipment developed by RRU allowed the NTDS computers to communicate with the analog weapon direction equipment and designate targets for engagement by the missile launchers and guns.
- Keyset Central (KSC) Interface Equipment - 1960. The KSC equipment developed by RRU provided the interface which allowed the input of a variety of analog shipboard devices and manual input devices to the digital computers.
- Keyset Central Multiplexer (KCMX) interface between NTDS and
several analog and digital systems - 1964. The KCMX developed by
Univac greatly expanded the capabilities of the KSC adding many
analog to digital converter channels, discrete input and output
signals, and output channels for connection to digital to analog
converter boxes. The KCMX allowed the NTDS computers to interface
with the systems of different ship types.
3.3 NTDS for Navy's first nuclear powered surface ships [Cruiser Long Beach CGN 9 and Aircraft Carrier Enterprise CVN 65] - 1962
During the service test phase computer systems were ordered for and installed aboard the U.S. Navy's first nuclear powered warships. These computer systems interfaced with the Navy's first digital phased-array radars which were aboard these ships.
3.4 Weapon Direction System (WDS) Mark 11 - 1964
The WDS Mark 11 system was a digital system developed by Univac to replace the analog weapon direction systems aboard Navy ships. As NTDS was performing many of the same functions as the analog weapon direction systems, it was possible with the addition of a few digital displays, a weapons control panel developed by Univac and some digital computer programs to eliminate a huge amount of analog equipment aboard Navy ships.
3.5 DLG 6 and 16 Class NTDS - 1966
An NTDS system including the newly developed WDS Mark 11 Weapon Direction System and a new digital radar were installed on the DLG 6 and 16 class destroyers significantly improving the operational capabilities of the combat systems of these 19 ships. In addition, the underwater battery fire control system was connected to NTDS. The DLG 6 and 16 Class ships were some of the first ships to use the CP-642B version of the unit computer. The CP-642B was twice as fast as the CP-642A.
3.6 ASW Ships Command & Control System (ASWSC & CS) NTDS systems for antisubmarine warfare.
Implemented on Destroyer Escorts and ASW Aircraft Carrier - 1966: The ASWSC & CS although implemented on only three ships allowed the development of improvements in antisubmarine warfare using digital computers. These improvements were implemented in other ship classes which also have an ASW capability. Univac defined the equipment and developed the software to incorporate ASW functions.
3.7 German DDG Combat System - 1966
Univac developed a one computer system and the computer programs for the combat system for three German Navy guided missile destroyers.
3.8 Digital TALOS Shipboard Missile Fire Control System - 1967
Univac utilized a smaller word length digital computer (CP-848, Univac type 1219.) We developed and wrote the software to digitize the former analog fire control computer which controlled the TALOS shipboard missile system. The system was implemented on several Navy cruisers.
3.9 Junior Participating Tactical Data System (JPTDS) System for Small Ships - 1969
JPTDS was one of the first systems developed using the new
generation of powerful shipboard computers, the AN/UYK-7, developed
by Univac. The AN/UYK-7 used integrated circuits and was many times
more capable than the original NTDS computers. It was now possible
to perform all command and control functions for small ships in a
single computer.
JPTDS was was installed on four U.S. destroyers (USS Towers DDG 9, USS
Robison DDG 12, USS Berkeley DDG 15 and the USS Cochrane DDG
21) and three Australian destroyers (HMAS Perth, HMAS Brisbane
and HMAS Hobart). The first installations were in 1973 on the
USS Berkeley at the [Long Beach Naval
Shipyard**] and the USS
Cochrane at the Pearl Harbor Naval Shipyard. The system remained
on all ships until they were decommissioned around 1990.
For years I supported the fire control system that used two 1219B computers to schedule up to 8 targets to be engaged with the
SM-1 anti aircraft missile and control two SPG-51C fire control radars, the missile launcher and compute missile orders for the
SM1 anti aircraft missile. If the ANUYK-7 computer located near
CIC could not control the operator consoles in CIC the program I
supported could control enough consoles in CIC to keep the Fire
control System up and running.
Dale Flowers
**Sirs: The installation on the USS Berkeley (DDG-15) did not occur at the Long Beach Naval Shipyard as related by Mr. Flowers. It occurred at Puget Sound Naval Shipyad at Bremerton. I reported to the USS Berkeley in October 19072 on the day she retuned to her homeport of Long Beach from a WestPac deployment. In early January 1973 the Berkeley departed for Bremerton. Her homeport was changed to Bremerton where I was the Missile Officer and monitoring the JPTDS installation was my responsibility. My division, Fox Division had the DSs assigned for maintenence. When the Berkeley departed Bremerton, she sailed to her new homeport of San Diego. Sincerely, Raymond Moon USS Berkeley '72-76.
3.10 DD 963 Combat System - 1972
Univac provided much of the computer system hardware including computers and KCMX for the combat system aboard the new construction DD 963 destroyers.
3.11 DLGN 38 Combat System (first AN/UYK-7 multiprocessor NTDS) - 1973
The DLGN 38 Combat System incorporated the new AN/UYK-7 multiprocessor computer system developed by Univac. Univac also developed the operating system for the multiprocessor system and the initial command and control programs for this ship class.
3.12 DDG 993 Combat System - 1977
Univac utilized the DLGN 38 computer system design and modified the
software to be implemented on four guided missile destroyers the U.S.
Navy sold to the Iranian Navy. A shipboard combat system and a computer
program development center were implemented in Eagan for system development
and training. Iranian Navy personnel came to Eagan for training. The
four ships had not been delivered to Iran when the Iranian government
was overthrown so the U.S. Navy ended up with the very capable ships.
Univac developed the command and control systems and software for several
classes of Japanese Navy ships and trained Japanese Navy personnel on
the systems.
- Japanese DDG 2308 and 2309 Combat System - 1973 & 1976
- Japanese DD 52 and DDH 2403 Destroyer Combat System - 1977
- Japanese DDG 2310 Combat System - 1980
3.13 German F 122 Combat System - 1978
Univac developed the command and control system utilizing the new AN/UYK-7 multiprocessor for this new class of German Navy Frigates. Univac developed the software to simulate many of the German developed shipboard systems which interface to the AN/UYK-7 so that the command and control software developed by the German Navy could be thoroughly tested.
3.14 Canadian SHINPADS (Serial Data Bus System) - 1980
Univac developed the serial data bus and associated control software for implementation with a distributed computer system.
3.15 Canadian Patrol Frigate Combat System - 1984-1989
Univac developed the combat system hardware and software for the new construction Patrol Frigates being built by Canada. The system implemented distributed AN/UYK-20 computers and the SHINPADS serial data bus developed by Univac. Much of the system development was performed in Canada by Univac personnel (American and Canadian) working in the Winnipeg facility.
3.16 SPY-1 [Aegis] Combat System Computer System - 1984 - 200X
Univac provided the AN/UYK-7 [and later the AN/UYK-43] multiprocessing
computers and system support engineers for implementing the Aegis phased
array radar of the Aegis system implemented on new construction cruisers
and destroyers.
![]()
4. Submarine systems by Quint Heckert
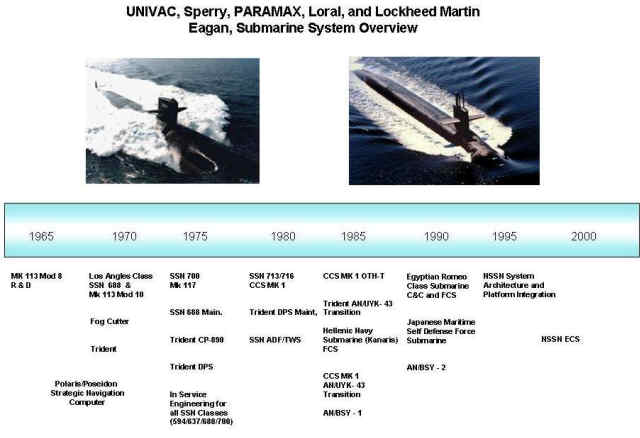 4.1 MK 113 Mod 8 R & D - Also referred to as the
Pargo display program.
4.1 MK 113 Mod 8 R & D - Also referred to as the
Pargo display program.
This was an effort undertaken with Electric Boat to prove the feasibility of performing passive acoustic fire control system computations with required accuracies and the display of the solution data in a meaningful way for operators. This effort was one of the milestones for introducing digital computers and displays into the submarine community. It was the basis for the FCS MK 113 Mod 10 System which was installed in initial flight of SSN 688 Class Submarines.
4.2 Los Angeles (SSN 688) Class & MK 113 Mod 10
This program introduced several new technologies and concepts, all developed by UNIVAC, to the US Navy Submarine Fleet. The MK 113 Mod 10 system, initially installed in SSN 686 and 687 consisted of a single frame AN/UYK – 7 for Fire Control System use only. UNIVAC Items produced for this system were:
- AN/UYK-7 Computer
- UYK-7 Operating System (Common Program)
- Peripheral equipment tests
- Software generation Guidelines and Specifications
For the Los Angeles Class, UNIVAC produced and performed the following:
- Development and delivery of the first multi-processing capability to the US Navy
- System Design and Specification
- Development of the first US Navy Shipboard system featuring full automatic recovery from processor, memory, I/O and peripheral equipment failures. When a primary power failure occurred, a reduced capability was automatically instantiated in less than 4 seconds in order to preserve navigation system accuracy.
- First on line system equipment test and diagnostic capability.
UNIVAC developed the Dual Miniaturized Inertial Navigation System under contract to Autonetics.
- System Level Test and Integration through shipboard acceptance tests.
- Personnel Management Plan for all enlisted rates and rankings
4.2.1 Fog Cutter
A broadband passive detection and tracking system for use with AN/BQR-7 passive Sonar System. This effort introduced the UNIVAC 1616 computer which was upgraded to the AN/UYK-15 and later the AN/UYK-44.
4.2.2 Trident
Developed, and delivered the Trident Common Program/Trident Service Programs (a multi processing operating system based on the 688 Common Program for the Trident Defensive Weapon, Ship Control, and Navigation System
4.2.3 SSN 700 MK 117
Continued System Engineering and integration for total combat system which introduced the digital end-to-end Submarine Weapons System
4.2.3.1 In Service Engineering
Provided all levels of system support
for all classes of submarines including establishment of forward area
supply and repair capability
4.2.3.2 SSN 713/716 CCS MK 1 - Incorporated the Gyro Static Navigator into the
system in replacement of the DMINS of the earlier 688 class.
4.2.4 SSN ADF/TWS – Advanced Direction Finding and Tactical Weapons
System. System was developed by UNIVAC with Sperry Marine and provided
the capability to perform target localization and weapon order generation
using passive intercepted electronic emissions.
4.3 Hellenic Navy Submarine (Kanaris)
Provided a turnkey Submarine Command and Control and Weapons Control Program for the Hellenic Navy Submarines. System is TMD based and is capable of firing US/NATO MK 37 Torpedoes, HARPOON, and German SUT and SST4 torpedoes. We were responsible for and implemented all phases of the program including test firing of all the weapons to prove system accuracy and capability through acceptance by the Hellenic Navy. The system is capable of tracking and localizing targets/contacts based on active, passive, and optical inputs.
4.3.1 AN/BSY-1
System Design and integration support and development of the AN/UYK-44 Operating system and system architecture under contract to IBM.
4.4 Egyptian Romeo Class Submarine C&C and FCS
Turn key system from system specification and design through total system installation, test and acceptance on board each of the Egyptian Navy Romeo Class submarines. The Romeos are a Russian design/modified design of the earlier German Submarine, which the Soviets leased/gave to the Chinese who than built many of them and sold them to various 3rd world countries. The system developed by us is a 680xx based system embedded in the Multifunction Control Console developed by us for this effort. It is capable of tracking and localizing contacts based on active and passive sensor input and is capable of firing HARPOON, the US/NATO MK 37 torpedo and two Russian/Soviet torpedoes. Our system is required to compute firing solutions for and control all of these weapons.
4.5 Japanese Maritime Self Defense Force New Design Submarine
UNISYS provided System Engineering and Management to Hitachi including system architecture specification and design and Fire Control/Command and Control System capability definition.
4.6 NSSN System Architecture and Platform Integration
As UNISYS
and Loral we were subcontracted by Electric Boat for System Architecture
Definition and System Integration planning and specification including
the COATS for the NSSN. We were the designated contractor, by the US
Navy for digital/electronic system integration and management until
the time when UNISYS was purchased by Loral. Since Loral also purchased
IBM Federal Systems Division in Manassas who was a contender along with
Lockheed Martin, Syracuse for system development the Navy wanted to
avoid the appearance of a conflict of interest and our effort were stopped.
NSSN ECS – Developed and delivered he entire radio room (External
Communications System) for the NSSN.
![]()
4.7 From David Cross:
Do do you know why there is so little mention of the UNIVAC and Burroughs computers on the Fleet Ballistic Missile submarines?
The CP 890 Central Navigation Computer (very similar to a 490 series with square root instructions added) is normally the only one mentioned and then very briefly. It replaced the NAVDAC (24 bit originally only drum memory, later added 512 words of core), minimum access programming kind of supported by an automatic increment of 4 for the next instruction address. There was also a Burroughs computer used to run the celestial navigation system. Also GE for the GPS and Autonetics for the inertial navigation.
The NAVDAC and CP 890 in addition to coordinating everything
handled the sonar location finding and the LORAN C calculations.
![]()
4.8 From Quint Heckert:
As I remember it NAVDAC, the original, was built by Sperry Gyro to a design that was purported to be a UNIVAC design. It proved to not be very reliable, again as I recall, and was replaced by a Bunker Ramo box. Gyro built another computer, SINDAC, that was used with their MK 3 SINS.
I don't think the Gyro NAVDAC was ever on an SSBN. I know they were in the ocean survey ships (TAGS) Dutton, Bowditch and others that operated in support of the early Polaris project.
4.3 From Gerry Pickering:
The originator of the NTDS tracking algorithms was Dr. George Chapin
who had his PhD in mathematics. Whereas SAGE performed the tracking
function in "X" "Y" coordinates, Dr. Chapin formulated
the detection, storage, and correlation of aircraft target data in polar
coordinates. There was the conversion from polar to X-Y coordinates
for display purposes. NTDS provided manual tracking and automatic tracking.
A small group consisting of Al Magnuson, Roy Kot and me had the responsibility
of developing the automatic tracking programs, from radar date fed into
the NTDS computer from a video processor. The three of us transferred
from St. Paul to San Diego in the fall of 1959 to prepare for NTDS Service
Tests. Al and Ray eventually returned to St. Paul; I never did.
![]()
5. Aircraft Carrier Ride by Don Lovely and Mike Kokesh
My most memorable event occurred early in my 37-year
career at Univac/Lockheed Martin. In 1966, Mike Kokesh and I were given
the task of writing a comprehensive System Alignment Test (SAT) programs
for the radars and sonar aboard the Destroyer Escorts (DEs) 1047/9 and
the CVS-18. The CVS-18 was the aircraft carrier USS Wasp that became
famous for recovering the Gemini astronauts whenever and where ever
they landed in the ocean. Developing these sizable programs from scratch
by two relatively inexperienced programmers proved rather challenging
and probably was my most difficult assignment in my years at the company.
Finally in March 1968, we were called to ride the CVS-18 from the Boston
Naval Shipyard down to Atlantic Undersea Test and Evaluation Center
(AUTEC) range in the Bahamas for Sea Trials. On the way down, the ship
experienced a very bad three-day storm (70 knot winds and 25 foot waves),
the ship and its aircraft suffered some damage. After safely traversing
the worst of the storm, the ship received a distress call and the captain
ordered the ship to turn back into the storm. The ship's helicopters
were ordered to air lift the crew off of a merchant tanker at risk of
breaking up in the storm. The rescue was performed under dangerous conditions,
but was successful. The coordinating S2 aircraft, on returning to the
carrier crashed very hard on the rolling flight deck, tearing off its
landing gear and antenna, setting off the flares in the aircraft nose
and rupturing its fuel tanks. By some miracle the aircraft fuel flowed
down the deck of the pitching, rolling ship in the opposite direction
of the burning flares.
On arriving in the Bahamas I was requested to meet with the Carrier
Operations officer, who was a Commander and the third ranking officer
on the ship. He immediately asked me what my plan was for the ship's
course during the tracking and alignment testing of the three search
radars, the four Gun Fire Control System (GFCS) radars and the sonar
system. I then asked him what he recommended. He briskly replied, “You
are the Univac engineer. You tell me. I can drive this carrier any way
you want me to.” Quickly making up something, I said: "How
about a figure eight at 10 knots going out 10 miles in both directions
from the buoy target?” The buoy target contained a radar reflector
and a sonar transponder). “No problem” he said. “Be
in the CIC (Combat Information Center) and ready to go at 0300 and we
will run your test.”
At 0300, Mike and I very nervously started the test with CIC display
consoles manned and several officers observing. Within a short while
complaints started coming in that the GFCS radars could not maintain
track. Because of the several-foot-high waves, they would lose the target.
The sonar operator complained that he lost contact with the transponder
because it was too far away.
The CIC officer turned to me and said, “Your test is no good,
it is not working. What do you want to do now?” I nervously responded, “Uh,
Uh, can we try a figure eight at 5 miles and 5 knots.” He immediately
phoned the Bridge and said, “The UNIVAC engineer wants the ship
moved in to 5 miles and at 5 knots.” Soon I could feel the carrier
turning. I looked up at the heading and speed gauges and the carrier
was turning and slowing down. "Wow, I thought to myself - I am
in control of an aircraft carrier!"
Soon the sonar and GFCS operators each reported in that they were now
tracking the target with no problem. At the end of the SAT test we typed
out the results and they showed that the navigation radar (SPS-10) had
a 2.6 degree alignment error. The CIC officer looked at the results
and said, ”Your test is not any good. There is no way our 'Nav'
radar has such an error.” He then phoned the navigation radar
operator who arrived shortly. He took one look at the test results and
said, “This is good information. I always thought my radar was
off 2 or 3 degrees. I know you are right. I’ll correct the alignment
of the radar right away.”
For the next two days Mike and I were able to relax and watch the daily
flight operations. Then we got to be catapulted off the carrier in an
S2 aircraft and were flown to Miami International Airport.
After a colorful history, the USS Wasp (CVS 18) was officially decommissioned on 01 July 1972, then subsequently sold for scrap.
The WASP Radar Alignment Test (RAT) program was later modified by Don Lovely
and installed and used as the RAT program on the German Destroyers DDG
28/29/30. Larry Duder later modified and installed the RAT on the Japanese
Navy DDG 168/9 ships.
![]()
6. TRANSIT by Arlyn Solberg
The TRANSIT satellite system was developed by the Applied Physics
Laboratory (APL) of Johns Hopkins University [Baltimore, MD] for the
U.S. Navy.  Just days after the launching of Sputnik I on October 4th,
1957, APL scientists George Weiffenbach and William Guier were able
to determine Sputnik’s orbit by analyzing the Doppler shift of
its radio signals during a single pass.
Frank McClure, the chairman of APL’s Research Center, suggested that if the satellite’s
position were known and predictable, the Doppler shift could be used
to locate a receiver on Earth.
Just days after the launching of Sputnik I on October 4th,
1957, APL scientists George Weiffenbach and William Guier were able
to determine Sputnik’s orbit by analyzing the Doppler shift of
its radio signals during a single pass.
Frank McClure, the chairman of APL’s Research Center, suggested that if the satellite’s
position were known and predictable, the Doppler shift could be used
to locate a receiver on Earth.
{Editor's note: Russia uses the Cyrilic Alphabet: top left is 4 October 1957 year; bottom left
is 40 kopeck (cents) Post office of the Union of Soviet Socialist
Republics (CCCP=USSR); the text below the globe is First in the
world, Soviet experimental satellite of the earth. Translation by LABenson.}

Development of the TRANSIT system began in 1958, and a prototype satellite, Transit 1A was launched in September 1959. That failed to reach orbit. A second satellite, Transit 1B, was successfully launched April 13, 1960 by a Thor-Able star rocket. The first successful tests of the system were made in 1960, and the system entered naval service in 1964.
What I (Arlyn) did:
This is the system which I programmed and tested in late 1963 based on a model from APL. I was working in San Diego for UNIVAC on the Naval Tactical Data Systems (NTDS). I was assigned the task of analyzing and converting the APL Fortran model into assembler language to run on the on-board AN/USQ-20 NTDS computers. The Navy had installed a ‘transceiver’ on a Cruiser [or destroyer – it was a long time ago] which was in dry dock at the Mare Island Naval shipyard north of San Francisco in early 1964. I had use of the on board computer system and transceiver equipment during third shifts. I finally got correct results based on APL’s data profiles and the Navy decided to run a sea trial.
I had a secret clearance and was sent to Norfolk, VA naval shipyard in March, ’64 to run some tests on the system which had been installed on the CGN-9 as I recall. The CGN-9 was the USS Long Beach, a Cruiser(C), Guided missile (G), Nuclear (N) powered ship. Everything re-tested as expected and was ready for sea trials.
I was requested to join the fleet after the upcoming sea trials. Navy HQ in Washington DC gave me a field rank of Lt. Commander, USN as I had to fly over Cuba on my way to sea trials in the Virgin Islands. They wanted me to be treated as an officer in case the plane went down and I was captured. I still have the ID card. The fleet sailed into the Caribbean and I was sent to meet them in late March, 1964 to make sure that the systems were running OK. I arrived in St. Thomas, Virgin Islands via San Juan, Puerto Rico and checked into the Holiday Inn to await the fleet arrival. The fleet was still a couple days out of port and I and our engineer from San Diego enjoyed the mini-vacation.
We were finally contacted and picked up in a launch to go out to
the CGN-9 to check out the results of the sea trial that the Navy had
run on the way down. I verified that the data fit within tolerances
as I had expected. We compared the satellite navigation positioning
data to the Loran C data and found our accuracy was about 1/10th
of a mile in Longitude/Latitude. The Loran system was about ½ mile in
accuracy. The navy command on board was satisfied with the results and
I was returned to the island after about two hours on board. I didn’t
realize at the time the magnitude of the importance of the system in
years to come. I had successfully programmed and tested the Navy’s
version of the forerunner to the first GPS!
![]()
7.0 NTDS Service Test
by Gerry Pickering
The Univac contingent that would undertake the Service Test of NTDS arrived in San Diego from St. Paul in late summer 1959. I transferred in August and found there were already a few people there. A few months later I was appointed Supervisor, Operational Programming. That implies there were other programming and non-programming groups; all that other stuff reported to Ralph Hileman. And both Ralph and I reported to Dr. George Chapin who was still located in St. Paul.
The Operational Programming Group consisted of some 35 programmers, broken down into several sections. Section heads were Gordy Erickson (Exec, Inter-computer, Inter-ship Communications), Ray Kot (Tracking), Dick Hansen (TEWA- Threat Evaluation, Weapon Assignment), Ernie Mutschler (Intercept Control), Paul Hensel (Missile Control). It was our unanimous opinion that Gordy was the smartest, and had the greatest overall knowledge of NTDS: each and every problem that surfaced was first directed to Gordy.
The entire Univac contingent, together with a small cadre of Navy officers that were assigned to answer our questions about the Navy, Navy ships, WAVES (all the ugly ones they make officers), etc. were housed in renovated World War II barracks on the facilities of the Fleet Anti-Air Warfare Training Center (FAAWTC) on beautiful Point Loma overlooking San Diego Harbor. Adjacent to FAWTC was the Navy Electronics Lab (NEL) at which the NTDS mock-up was installed.
I don't recall exactly when Service Test officially commenced; it was likely in late 1961, early 1962 so we had about two years to do final design corrections of hardware and software, and get ready for the official Test when everything is turned over to OPTEVFOR (Operational Test & Evaluation Force). For the Operational Programming Group, Service Test in reality started when the three ships arrived in port, each with their Combat Information Center (CIC) retrofitted with NTDS display consoles and the Univac computers. There were three ships: one carrier [CVA-34 USS Oriscany], and two destroyers [DLG-10 USS King and DLG-11 USS Mahan]. All three ships were docked at North Island, accessible from San Diego only by ferry.
Though we continued to do development work at NEL, final debugging shifted to the ships. And when the ships went to sea, so too did a contingent of operational programmers. As the carrier could better accommodate us, the largest contingent was always aboard the Oriscany. Our only communications between ship and shore was ship radio. There were times when someone left on shore had to be rushed to sea, and visa versa. Transportation was via a prop plane COD (Carrier-On Board-Delivery); Ernie Mutschler described a carrier landing as a controlled crash. I was not so brave as Ernie; I never landed, I only took off from the carrier's deck. But there were a few young programmers braver than Ernie; they were the ones willing to high line from the carrier to a destroyer. I didn't do that either.
The ships soon adopted a schedule where they would depart port early Monday morning, and return to port late Friday afternoon - every week for months. Those programmers that had been left on shore during the week rushed to the ships to install the latest corrections. Those programmers that had been at sea for the week often rushed to NEL to check something out. It was probably the most concentrated work period that any of us had ever experienced. And we obviously grew very close.
As did the wives. Joan (my wife), Peggy (Ray's wife), Lois (Ernie's wife), Karen (Dick's wife) and I'm forgetting a few names would call one another for any word any wife had on arrival in port, or return home for the week-end. It is amazing the wives put up with our crazy schedules with so little complaint. When we did get together as couples in a social venue, the couples were also extremely close, no exceptions. As we were all away from our families back home, we were a family unto ourselves. And when any member of our "family" returned back to St. Paul, those remaining grieved their departure.
When the official Service Test commenced, it was
a time of some relief. The system worked, we had no doubt of that. But
when word came down that OPTEVFOR had passed NTDS with flying colors,
our collective hearts jumped with joy. And when a few months later,
word filtered down that some high ranking Admiral had called NTDS
"the most reliable system in the Navy today", all
that hard work and long hours was more than justified. Clearly one of
the most prideful moments in my life. [Gerry Pickering]
![]()
8.0 Service Test Too
NTDS Service Test was fast approaching. The carrier USS Oriscany [CVA-34] had arrived in San Diego in September 1961. On the other side of the continent, the USS Enterprise [CVAN-65] was nearing completion at Newport News Shipyard with sea trials scheduled for November. The Enterprise, the first nuclear carrier, was the Navy's pride and joy. Per the Admirals that control these sorts of things, it had to have NTDS installed and operational for sea trials.
"No way" I loudly and vehemently responded when approached by some blue suit with lots of stripes on his arm. "We are staffed thin, and can't afford to divert anyone from the Operational Programming Group for an effort not heretofore planned. Plus the Enterprise had phased array radar, which is totally different than the Oriscany's radar. We haven't programmed for phased array, and aren't about to with Service Test so imminent. No way" in case the suit hadn't heard me the first time. My section heads, Ray Kot and Gordy Erickson agreed there was no way any time and energy could be diverted without endangering our readiness for Service Test.
But the suit, joined by other suits with even more stripes, and then by my bosses in UNIVAC demanded I "had to find a way to do something. This is the Enterprise we're talking about." In consultation with Ray and Gordy, we agreed we could put together a very abbreviated tracking package using surface radar. That way the Enterprise could track ships in the area of the sea trials. And for no extra effort, "we could throw in Navigation". Very, very reluctantly, Ray offered up Vartan Kosharian from his tracking group.
Vartan was a competent programmer, and by himself could put together the abbreviated package. And alone could go aboard the Enterprise to debug the package in time for sea trials. But, we held our breaths. To compensate for the pressure they had put on us, the suits extended invitations to Ray and me to ride the ship during sea trials. Though the timing was bad, we accepted. Plus somebody had to keep an eye on Vartan to insure his guarantee that we were ready was for real.
Though the Enterprise can hold a complement of nearly 6,000 men,
a full complement of aircraft was not aboard for sea trials, so there
were considerable private compartments available. Ray and I were given
VIP treatment, including an introduction to the ship's commander. Captain
De Poix thanked us for being so responsive, and commended the job done
by Vartan, whom he kiddingly called "the Persian Rug Salesman".
Obviously the two had gotten to know each other. Vartan beamed.
The sea trial took place off Norfolk, for the most part out in the Gulf
Steam where temperatures were in the 70's in November - A beautiful
ten days or so at sea. Though classified at the time, full speed ahead
meant 36 knots. And hard rudder right, and hard rudder left had the
monster ship noticeably listing to port and starboard. And the abbreviated
NTDS tracking package performed to everyone's satisfaction. Thanks to
Vartan, Gerry Pickering
9.0 System Retiring
USS Carl Vinson
Three CP-642B computers were used to run NTDS until 22 Sept. 1990
when she went to the yards in Bremerton. I was an OS2/NTDS track
supervisor and was also able to reload the NTDS OP program.
It would degrade after a day
or two. Track supervisor mode did not have an "air assumed friendly" button so I was having
to roll back and forth from track sup to ID operator mode. I had the source code on microfiche, so I found the button
array and I used debug to change my missile button to air assumed
friendly. Unfortunately, the program would not save with the change
maybe size / CRC check.
I was told that the hardware came
from the USS Oriskany CV-34.
Josh Barrett, OS2 USS Carl Vinson (CVN-70) '88-'90
10.0 NTDS Technical Manuals
The Bit-Savers' web site has captured over 30,000 computer manuals and images. To facilitate researchers and as a back-up; the VIP Club Legacy committee has copied some of these into our web site. NTDS manuals are:
- Case Study of the Development of the Naval Tactical Data systems
- Naval Tactical Data System Brochure
- PX1343-11 Naval Tactical Data Systems Tech note #221, Input/Output
- PX1343-36 NTDS Technote No. 240, Instructions volume 1.
- PX1343-36 NTDS Technote No. 240, Instructions volume 2.
- PX1343-38 NTDS Technote, USQ-20 characteristics
- PC1343-38 NTDS Technote, USQ-20 summary
- PX1493 NTDS Programmers' guide volume I
- PX1493 NTDS Programmers' guide volume II
- Robert Joyce Naval Post Graduate Thesis - AN/UYK-20 history
- NTDS Technician training course
In this Chapter
- Introduction [left]
- Navy Surface System Genealogy
- Navy Systems' Descriptions
- Submarine Systems
- Aircraft Carrier Ride
- TRANSIT, world's 1st GPS?
- NTDS Service Test
- Service Test Too
- NTDS 20B System retired.
- NTDS Papers/ Manuals.
Chapter 67 edited 7/13/2025.
![]() |
Home, Pg 1 |
Our Legacy, Ch 1 |
People |
Locations |
Engineered |
Computers |
Systems |
Contacts and Links |
Site Map, Pg 0 |
|
Home, Pg 1 |
Our Legacy, Ch 1 |
People |
Locations |
Engineered |
Computers |
Systems |
Contacts and Links |
Site Map, Pg 0 |
Copyright ©2025, LABenson for the VIP Club. All Rights Reserved; Hosted on www.webhostinghub.com since 2011.