

Information Technology (IT) Pioneers
Retirees and former employees of Unisys, Lockheed Martin, and their heritage companies
Aerospace Systems, Chapter 66
1. Introduction
RC 'Bob' Hanson said that there were about 300 Ground Guidance Launches
(200 from Vandenberg AFB, 100 from the Cape).
Our systems also launched missiles from Johnston Island. The AF
tracked space junk from Sunnyvale CA and other sites worldwide -
including Alice Springs Australia.
2. Univac’s Radio Guidance of Missiles at Vandenberg Air Force Base (VAFB) by Dick Kistler
I joined Univac as a programmer in April of 1964
and was assigned to the real time missile guidance group in Bob Hanson’s
organization. Ed Solheim and Bob Russell were the two managers in the
organization and my immediate supervisor was George Smith. The real
time programmers in the group worked on the Athena computer, which I
was to learn was probably the most reliable computer ever built {Editor's
note: at that time}. I attended an Athena programmer’s class although
I never got to write any guidance programs for the Athena.
The Athena was originally developed to provide guidance to the Titan
I Intercontinental Ballistic Missiles (ICBM) that were housed underground.
The guidance computer needed to be extremely reliable but did not require
much versatility since the guidance equations were fairly simple. Targets
for the ICBMs were known in advance and implicit guidance equations
[fly a wire trajectory] were sufficient to get the job done and guide
the missile to the target. The program was stored on a large revolving
magnetic drum that only had room for 8K of instructions. There was a
small “scratchpad” memory for data. It contained 256 24-bit
words of rewritable core memory. One of the biggest challenges in Athena
programming was spacing the instructions around the drum so they would
be under the read head at the proper times. A basic instruction time
was 40 microseconds and the various instructions would all be some multiple
of 40 microseconds. Programmers developed the instruction spacing program
on another computer.
The early space programs from Cape Canaveral and Vandenberg Air Force
Base used the Athena as the guidance computer. However, as missile guidance
technology evolved toward explicit guidance equations, where all the
targeting did not need to be done prior to launch, the Athena could
not provide the needed capability. Thus, the move toward more general-purpose
computers became the next logical step. This would lead to major changes
in philosophy as well as hardware and hardware interfaces.
Philosophically, a general-purpose computer meant that programmers could very easily
change the program in the computer’s core memory, so many security
processes needed to be developed to insure the integrity of the guidance
system. The hardware changes were extreme since the new computer and
all its peripherals would be much smaller than the nearly 400 square
footprint required by the Athena’s large cabinets. Also, a new
interface needed to be developed to tie the general-purpose computer
to the ground radar system. Univac engineers developed a small [about
3 feet by 3 feet by 1 foot] Radar Interface Unit (RIU) that effectively
made the computer change transparent to the radar.
An Athena computer also guided the Air Force Program 437 on Johnston
Island, but the follow on program, Program 437AP, needed more sophisticated
guidance equations, and it was the first radio controlled ground guidance
program to be written on a general purpose computer. In late 1964 or
early 1965 a small group of real time programmers was assigned to develop
the new guidance program on a Univac 642B general purpose computer.
The small group consisted of Paul Becvar, Steve Chodos, Wayne Hiller,
Dick Kistler, Don Neff, Dick Olson, and Wayne Walther. We were given
Special Access clearances and sequestered in a small office area of
Univac Plant 1. The team not only programmed the real time guidance
equations per a specification from another contractor, but also designed
and developed the real time executive that would control the program
and interface with the new RIU. The team also designed and developed
the non real time support software that was needed. All the real time
software was written in the CS-1 assembly language. The assembly language
programming enabled more efficient programming and (we believed) more
reliable programming that could be more easily debugged.
Shortly after we finished the Program 437AP programming we were given
a new task: to develop the guidance program for the Air Force Program
110 [a Titan IIIB booster and our Agena D upper stage] which would be
launched from Vandenberg Air Force Base (VAFB), CA. It was going to
be a much larger task than the 437AP task so the team was expanded by
the addition of several programmers: Larry Buhr, Ron DeMars, Bob Homyak
and John Neeson.
Starting in the fall of 1965 the Program 110 programming
team worked out of offices in Univac’s Plant 1 in St Paul but
spent considerable time in Plant 5 where the computer system was setup.
Members of the team who developed the non-real time portions were able
to use the computer center in Plant 1.
In December of 1965 Univac management informed us that they were going to establish
an office onsite at VAFB and would be staffing it with the Program Manager
and a staff of programmers. It was to be a two-year semi-permanent move
with plans to return to the Twin Cities at the end of the period.
The team continued developing the guidance program
and all the support software until late February of 1966 when Charlie
Gardner, Program Manager; Dexter Pehle, Systems Engineer; Harold Tuset,
Programming Supervisor; and six programmers relocated their households
to Santa Maria, CA. The programmers who moved were: Larry Buhr, Steve
Chodos, Ron DeMars, Bob Homyak, Dick Kistler, John Neeson and Jack Pittenger.
Other members of the Program 110 team made prolonged trips to VAFB to
help develop and debug the software in preparation for a planned July
launch. Dick Olson 'Ole' spent almost all of the following five months
[March to July] on site although he did not move his household.
In addition to Univac the Program 110 guidance team consisted of Lockheed
Missiles and Space Company (LMSC) [Sunnyvale, CA], Bell Telephone Labs
(BTL) [Greensboro, NC], and Western Electric Company (WECO) [Winston
Salem, NC and VAFB)]. LMSC, under the guidance of Bill Chapin, developed
the trajectory optimization software that would provide the ideal trajectory
for the launch. BTL, under the guidance of Bob Tarrant, developed the
explicit guidance equations that would use the targeting information
and provide the guidance commands to be sent to the missile. WECO was
the guidance station integrator and provided the ground radar system
as well as the antenna and radio guidance box on the Titan IIIB.
The months of March through June were a very intense period of final
development and checkout for the Univac programmers at VAFB. Everyone
spent up to 12 to 14 hours a day, seven days a week, except for Easter
Sunday, getting ready for a late July launch date. Bob Tarrant was onsite
for several months as the equations were also being debugged using the
WECO analog simulator with the ground radar system. Also present were
Del Driver and Herb Lewis, two members of The Aerospace Corporation
from El Segundo, CA. As the technical advisors to the Air Force, the
Aerospace engineers asked all the necessary, penetrating questions and
evaluated reams of data to ensure the guidance system was working properly.
Finally, in late July the guidance system was declared ready
to support the first launch of the Titan IIIB, Agena D. On launch day
the countdown was delayed for many hours as the launch team solved one
booster/payload problem after another. The guidance station was located
under ground in a former Titan I launch facility with no view of the
outside or the launch pad. Most if not all the programming team were
present in the guidance station in the unlikely event that they would
be needed to solve some unforeseen problem. Once it became obvious,
after hours of holds, from the countdown network audio that we were
finally going to launch in a couple minutes, Harold Tuset and I went
outside the complex so we could view the launch. After all, we had seen
countless simulations and knew what everything looked like in the guidance
station computer center and we wanted to see the Titan liftoff, even
though the launch pad was about 10 miles from the guidance station.
As we stood on the hill above the guidance station
without a worry in the world, we soon realized that more than two minutes
had passed and we were probably in another hold situation. Then we heard
shouting coming from the tunnel leading to the guidance station: “Tuset,
we need you in here.” “Kistler, we need you in here.”
Then came our most embarrassing moments and probably career low points.
After all, Univac had never had a problem that caused a launch hold
or a launch failure, but we were informed that our guidance computer
had just caused the launch to be held.
To insure the integrity of the software we had designed a feature in which the
computer would perform a checksum of the guidance program when the guidance
system was switched into launch mode. When the WECO guidance control
officer placed the guidance station into launch mode the computer dutifully
performed its checksum and, unfortunately for us, detected a checksum
error. This was not a problem that could be quickly solved and the decision
was made to scrub the launch and try again another day.
It did not take much analysis for us to find the cause of the checksum
failure. Using a technique we called core dump comparison, in which
we compared the entire core memory of the computer after the problem
with the core memory of the computer when it was loaded that morning,
we quickly found one instruction in the guidance program that had picked
up an extra bit.
Since timing pulses, data and action interrupts from the RIU drove the real time executive, we had
decided to have the executive sit and wait in one place for the interrupts.
We did this by putting in an instruction that jumped to itself, thus
the program would cycle on the one instruction until it needed to take
action to process the next interrupt. During the many hours that day
that the guidance program was just cycling, processing interrupts, and
waiting for the signal to go into launch mode it probably spent 95%
or more of that time executing the single jump to itself instruction.
As we found out later, the repetition caused that particular circuitry
to heat up and eventually the instruction picked up a bit that then
caused the checksum to fail when the launch mode was initiated.
Once we were able to point out the location of the additional bit and
explain the executive’s software design to the hardware engineers
they quickly deduced the overheating problem. They replaced the card
that had failed, we modified the real time executive to loop through
about ten instructions while waiting, and we reestablished the guidance
program software integrity to everyone’s [our Air Force program
office representatives, the Aerospace engineers, and the WECO guidance
station integrators] satisfaction. A couple days later on July 29, 1966,
we successfully guided the first Program 110 payload on its way to orbit.
That, as far as I know, was the only time that
a Univac ground guidance system was responsible for a launch hold and
it never was responsible for a launch failure. We continued to successfully
support Titan IIIB launches at a rate of about one launch every six
weeks for many years.
Not only did Univac provide years and years of successful support
but the information on one of the guidance system peripherals was used to save a mission.
One of the guidance computer’s peripherals was a 30-inch by 30-inch Milgo
plotter. Prior to every launch the guidance program would run the nominal
mission and plot the expected flight trajectory on the Milgo plotter.
We displayed two plots: the downrange versus the cross range plot and
downrange versus the altitude plot. We would plot the nominal trajectory
plots in green ink and then plot the real time [whether it was a simulation
run or a real launch] in red. These plots were very useful in the analysis
of various dispersions during simulation runs and the plots gave a real
time view as to how well the missile was following the nominal trajectory
during an actual launch.
One day during the last two minutes of a launch countdown the final “go”
or “no go” decisions were being given on the audio network. When the
Launch Control Officer went down the list asking for readiness from
the booster, the payload, range safety and the guidance system everyone
said they were “green” except the Range Safety Officer,
who said the range was “red.” There had been a power failure
in the range safety system and the Range Safety Officer had no information
available from the range safety radars. For whatever reason the Launch
Control Officer did not acknowledge the “no go or red” condition
from range safety and cleared all systems to proceed to launch.
The Titan lifted off and proceeded nominally toward orbit. It was the
prerogative and probably the responsibility of the Range Safety Officer
at that time to send the destruct command and destroy the missile and
its payload since he had no visual information as to the position of
the missile. However, as he did during every launch, the WECO Guidance
Control Officer stood in front of our Milgo plotter and gave a “play
by play” commentary over the network as to where the missile was
with respect to downrange, cross range and altitude and how close we
were to the nominal trajectory. The Range Safety Officer had enough
faith in the Guidance Control Officer and our trajectory plots that
he let the Titan continue on to orbit. A day that could have ended with
a failed mission instead ended with a successful launch thanks in part
to our trajectory plots.
In the late 1960’s another major missile program development effort
was being planned for VAFB. That was the Air Force’s Program 467, which was to be launched
on a Titan IIID. Charlie Gardner had visions of an expanded role for
Univac for Program 467. For Program 110 all the trajectory analysis,
trajectory optimization and trajectory design work was done by LMSC
in Sunnyvale, CA, under the direction of Bill Chapin. Charlie thought
that if he could lure Bill Chapin and his key people away from LMSC
that the Air Force would be willing to give Univac the trajectory contract
as well as the guidance program contract. Charlie successfully hired
Bill Chapin and his key staff members: Dick Kallaus, Jamie Lavios, and
Ed Tilford. Bill then hired Bill Exely, who had worked with NASA in
trajectory analysis and simulation design for the Saturn V moon rocket.
With such a talented staff of trajectory experts
working for Univac at VAFB the Air Force did indeed give Univac the
Program 467 trajectory contract. For a period of several years the level
of development at VAFB was at a very high pitch as 1230 computer systems
were installed to support the Program 467 trajectory optimization and
design and the new guidance program development. All the effort culminated
in the successful launch of the first Titan IIID on June 15, 1971.
During the first few years after the Program
467 development efforts concluded, many members of the programming staff
and all the key members of the trajectory development staff relocated
to Univac’s offices in Sunnyvale or St. Paul or left the company.
Univac however continued to provide support at VAFB to both the Titan
IIIB and Titan IIID for many years. The final launch of the Titan IIID
occurred on November 17, 1982 and the final launch of the Titan IIIB/Agena
D occurred on February 11, 1987.
![]()
3. Johnston Island - Air Force Project #437
 Launches
from Johnston Island:
Launches
from Johnston Island:
- 1964 February 14 07:47 - AFP-437 demonstration interceptor mission Launch Vehicle: Thor DSV-2J 299 (20002) LC: LE1. Apogee: 1,000 km [600 mi].
- 1964 March 1 06:40 - AFP-437 demonstration interceptor mission Launch Vehicle: Thor DSV-2J 209 (20006) LC: LE1. Apogee: 674 km [418 mi].
- 1964 April 21 06:15 - AFP-437 combat training interceptor mission Launch Vehicle: Thor DSV-2J 290 (20003) LC: LE2. Apogee: 778 km [483 mi].
- 1964 May 28 07:32 - AFP-437 combat training interceptor mission Launch Vehicle: Failure. Thor DSV-2J 227 (20007) LC: LE2. Apogee: 932 km [579 mi].
- 1964 November 16 06:57 - AFP-437 combat training interceptor mission Launch Vehicle: Thor DSV-2J 236 LC: LE1?. Apogee: 1,148 km [713 mi].
- 1965 April 5 07:20 - AFP-437 combat training interceptor mission Launch Vehicle: Thor DSV-2J 155 LC: LE2. Apogee: 826 km [513 mi].
- 1965 December 7 02:28 - AFP-437(AP) interceptor mission Launch Vehicle: Thor DSV-2J 188 (20011) LC: LE2. Apogee: 487 km [302 mi].
- 1966 January 18 18:11 - AFP-437(AP) interceptor mission Launch Vehicle: Thor DSV-2J 242 LC: LE2. Apogee: 459 km [285 mi].
- 1966 March 12 00:42 - AFP-437(AP) interceptor mission Launch Vehicle: Thor DSV-2J 196 LC: LE2. Apogee: 472 km [293 mi].
- 1966 July 2 20:53
- AFP-437(AP) interceptor mission Launch Vehicle:
Thor DSV-2J 289 LC: LE2. Apogee: 802 km [498 mi].

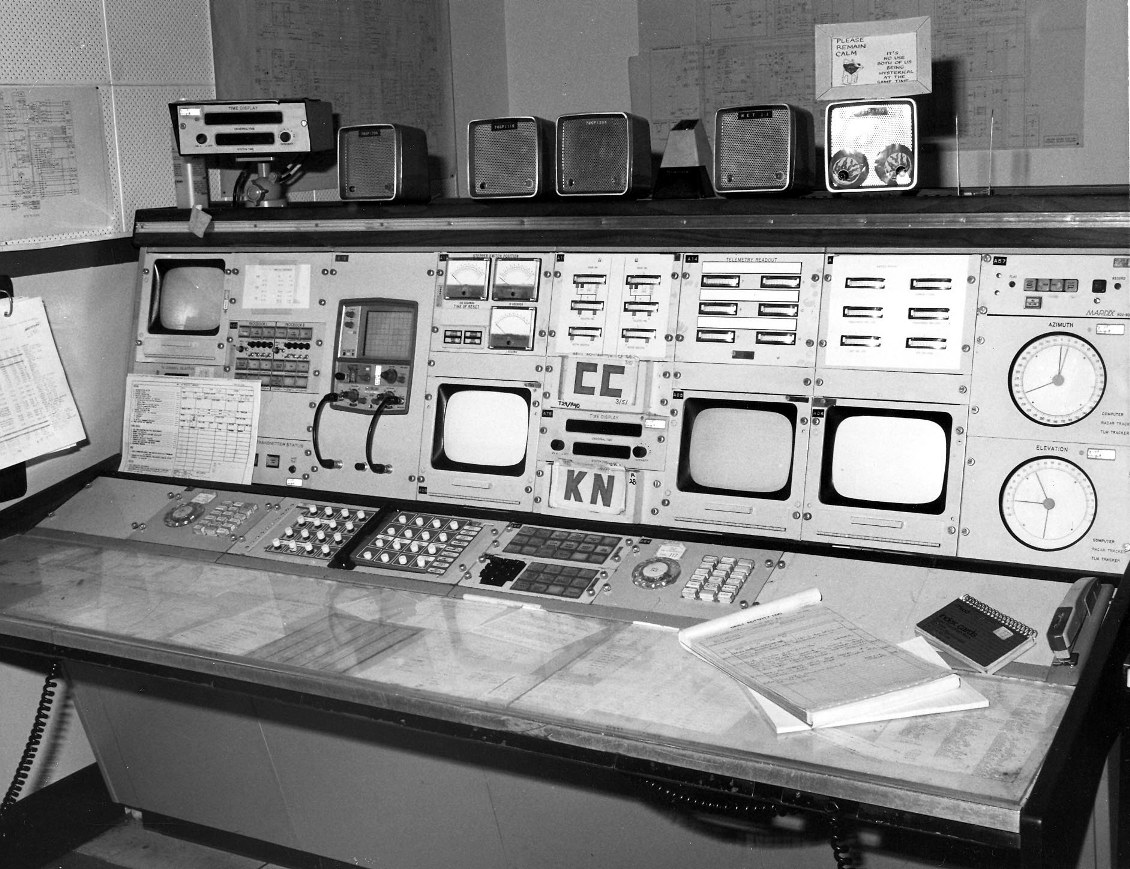
4. AF Missile Tracking by Don Neuman
The Sunnyvale site/headquarters is shown in this photo at the right.

Three major equipment groups comprise the subsystem:
- The computer complex provides the computational capability required to process data (telemetry, tracking,) in real time for support of orbiting satellites.
- The computer interface equipment provides the interface between the sensor equipment (e.g., tracking antenna, PCM and FM/FM telemetry ground stations) and the computer complex.
- The control and display equipment provides centralized
control and monitoring capability for the station.
The computer complex consists of the following equipment (picture below):
- Computer (Univac 1230 mTc)
- Two input/output consoles (Univac 1232)
- Two printers (Anelex 4113)
- Mass storage adapter (Univac 1531)
- Two disk controllers (CDC-3234)
- Four disk drives (CDC-854)
- Two maintenance panels
- SOC II computer control panel
- 400 Hz motor generator system
- Card reader (Mohawk 6002)
- Card reader adapter
 The Univac 1230 mTc computer is a general purpose, stored
program processor with active core storage for 49,152 30-bit words.
Memory access is 1.8u sec and memory protection is provided. Internal
parity checks are provided for all data words. Sixteen redundant input/output
(I/O) channels provide service for the two independent processors. Data
may be buffered or stored from externally specified or indexed memory
addresses. A priority interrupt system is
The Univac 1230 mTc computer is a general purpose, stored
program processor with active core storage for 49,152 30-bit words.
Memory access is 1.8u sec and memory protection is provided. Internal
parity checks are provided for all data words. Sixteen redundant input/output
(I/O) channels provide service for the two independent processors. Data
may be buffered or stored from externally specified or indexed memory
addresses. A priority interrupt system is
 provided. The maximum I/O data rate for a single channel is 166,667
words/sec.
provided. The maximum I/O data rate for a single channel is 166,667
words/sec.
- The Univac 1232 input/output console provides a means
for entering data into the computer using either punched tape or
the alphanumeric keyboard. The console also records output data
from the computer by punching paper tape, by printing on paper,
or both simultaneously. Paper tape is read at 500 frames/sec and
punched at 10 frames/sec. The console printer prints at the rate
of 10 characters/sec.
The Anelex 4113 printer prints 300 120-character lines per minute under control of the computer.
Text and photo extracted from www.kodiak.org/af_track as referred by Don Neuman to the Legacy committee. The system became the core for imaging processing as described in the NASA history web site, http://history.nasa.gov/computers/Ch9-3.html
5. Australia Tracking Station:
The linked web site discusses the use of both the 642B and 1218 computers. http://www.honeysucklecreek.net/station/technical.html
Submitted by Ron Q. Smith
![]()
6. Remote Tracking Stations by Neuman
 I was the Univac Systems Engineer/Manager on the RTS program for 20
years. That was the best job that I ever had. I was located at Sunnyvale.
I did hang out with the CDC systems engineer and watched their crew
repair the 3800 computers.
I was the Univac Systems Engineer/Manager on the RTS program for 20
years. That was the best job that I ever had. I was located at Sunnyvale.
I did hang out with the CDC systems engineer and watched their crew
repair the 3800 computers.
I traveled to all of the sites but I enjoyed IOS the best. We had some crazy guys in the field.
Pet Peterson and Dave Duray went from IOS to TTS. Now if that isn’t
crazy I don’t know what is. We had Dave Hunter (Ford employee
who had a Seychelles wife) work for us for a short time but when we
sent him to IOS the base commander kicked him off the island. Apparently
he had made a bad name for himself while he was a Ford guy on the Island.
I am still in contact with Roy Taatjes, he was the Univac “Engineer-In-Charge”
at GTS and may remember some of the Ford guys that had Seychelles wives.
In the years following the termination of the Univac contract I have
lost touch with most of the guys that worked on this program.
I have included some RTS photos that I had; at the right is an RTS Command
and Control console.
![]()
7. NASA Manned Spacecraft Center, Houston, TX
From Arlyn Solberg: Univac had both 494’s at Mission Control Center (Bldg. 30) and 1230’s which were being installed at Apollo tracking sites around the world. The 1230’s were replacing the Gemini program 1218’s which were connected to U494’s at Goddard space Center in Greenbelt, MD which in turn was connected to Houston’s 494’s via three 40.8kbs land lines. There was also a 1218 computer in Building 30 which drove all the big screen displays in Mission Control. I believe it interfaced with the 494’s receiving satellite tracking data in real time and driving the big wall displays showing the satellite and a couple of track revolutions. I had two programmers and two engineers on a one year contract that got extended several times. The Manned Spacecraft Center was south of Houston about 20 miles; chosen as the best location in the USA by Lyndon Johnson who was President at the time. The ‘Campus’ consisted of about 20 buildings of various sizes on about 100 acres.
I recall that Vic Benda [subsequently helped start AIC] probably wrote most of the programs for the 418 II and Bob Malnatti helped design interface hardware between the two systems.
September 2014: The American Computer & Robotics Museum in Bozeman, MT has just acquired the UNIVAC 418-II that was used in Houston during the Apollo Moon Missions at the Mission Control Center. It was implemented along with the three UNIVAC 493 computers for the reception of the telemetry data prior to it being passed on to the IBM 360s on the other side of the room. Story!
8. Others
 The
UNIVAC 1219B computer was used aboard Navy ships as the launch control
computer for Tarter, Terrier, and Talos ship-to-ship and ship-to-shore
defenses. We are seeking a retiree who has had experiences with these
systems to write about them. [lab]
The
UNIVAC 1219B computer was used aboard Navy ships as the launch control
computer for Tarter, Terrier, and Talos ship-to-ship and ship-to-shore
defenses. We are seeking a retiree who has had experiences with these
systems to write about them. [lab]
In this Chapter
- Introduction
- Vandenberg AFB
- Johnston Island
- AF Missile Tracking
- Australia Tracking Station
- Remote Tracking Systems
- NASA at Houston, TX
- Others
Chapter 66 edited 7/13/2025.
![]() |
Home, Pg 1 |
Our Legacy, Ch 1 |
People |
Locations |
Engineered |
Computers |
Systems |
Contacts and Links |
Site Map, Pg 0 |
|
Home, Pg 1 |
Our Legacy, Ch 1 |
People |
Locations |
Engineered |
Computers |
Systems |
Contacts and Links |
Site Map, Pg 0 |
Copyright ©2025, LABenson for the VIP Club. All Rights Reserved; Hosted on www.webhostinghub.com since 2011.